Wideband Algorithms for Migrating Targets Indication (WAMTI)
Modern surveillance radars are intended for detecting moving targets in complex environments that include interfering radar echoes from ground or sea surface, clouds and rain, etc. Such radars, typically transmit periodic sequences of RF pulses or sweeps (bursts), as sounding signals. Part of the transmitted energy is scattered back by the targets and the clutter, and then, the radar's receiver processor, thanks to signal processing algorithms, tries to distinguish between the clutter echoes and targets ones. Obviously, rejecting completely clutter echoes is impossible so, a realistic goal is to reduce them at lowest possible levels, providing sufficient "sub-clutter visibility" of small (low power) moving targets.
Unfortunately, an essential fundamental limitation of this technique comes from the inherent Range-Doppler ambiguities arisen because of transmitting sequences of pulses or sweeps.
-
Ambiguity in target's range estimation comes from receiving echoes from long range targets after having transmitted the next pulse of the sequence;
-
While ambiguity in target's Doppler velocity estimation is originated because Doppler frequency is measured using the phase shift between consecutive echoes. Phase difference is modulo 2π, which creates an ambiguity Doppler velocity estimations [0, PRF).
A standard solution for minimising these ambiguities is to transmit different repetition frequencies, but therefore longer observation times over the target are required. This fact is specially harmful for surveillance radars, which have scan the outer space in azimuthal and/or elevation sectors with high update rate, and therefore, suffer of strictly limited in time-on-target duration (time interval when radar beam is pointed to each direction of the scanning space).

Fig. 1 Range-Velocity maps : (a) Narrowband Δf/f0=1/10000; (b) Wideband Δf/f0=1/10;
A better possible solution to minimize these ambiguities is the main goal of this project and relies on increasing the radar's range resolution, up to a certain level in which target's range migration during the burst becomes non-negligible if compared to the radar's range resolution itself. If so, target's velocity can be estimated not only using the phase shift between successive pulses, but also using the target's range migration. So a burst of high range resolution pulses with low repetition frequency could give access to non-ambiguous range-velocity maps.
Therefore the implementation of wideband non-ambiguous waveforms and appropriate processing algorithms to this task, offers another approach to solve what is now a primary challenge of surveillance radar systems design: "the detection of small and slow-moving targets in clutter".

Fig. 2 � �Range-Slow Time� and �Range-Doppler� image for a single target together with clutter echoes.

Fig. 3 - "Range-Slow Time" and "Range-Doppler" image for multiple targets together with clutter echoes.
Thanks to facilities of the MS3 research group, the performances of the waveforms and algorithms developed will be evaluated not only by simulations, but also tested with real radar research platforms like S-band PARSAX and K-band CHL's radars which, used from the top of the building, allow to obtain real in real environments like controlling vehicles in near highways.

Trying to give a more complete solution, project's goal also include to detect and discriminate multiple targets not only in range but also in the angular dimension (cross-range resolution). Therefore one of the activities to be developed during the project will be the study of combining high range resolution techniques together with a monopulse approach in order to improve angular resolution.

Possible users of these results, and currently involved in the development and acquisition of data for testing the algorithms are THALES Nederland B.V, CHL Nederlands B.V., TNO Defence and Security and Metasensing, with the funds of the STW institution.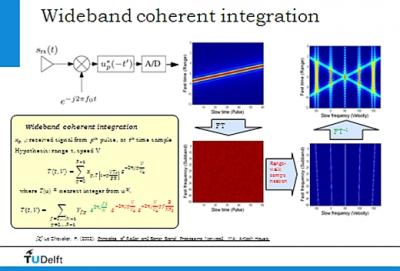

Project data
| Researchers: | Alexander Yarovoy, François Le Chevalier, Oleg Krasnov, Francesco Belfiori, Nikita Petrov, Alvaro Blanco-del-Campo |
|---|---|
| Starting date: | April 2013 |
| Closing date: | April 2017 |
| Sponsor: | STW |
| Users: | Thales NL, TNO, CHL, Metasensing, ISAE |
| Contact: | François Le Chevalier |